일반 물리학 Chapter 9. 선운동량과 충돌
*본 포스팅은 Serway 물리학교재 번역본 <대학물리학> 9판을 정리한 내용입니다. *
9.1 선운동량
새로운 물리량인 선운동량을 도입하자.
새 무리량을 도입하기 위해 질량이 \(m_1\), \(m_2\)인 두 입자가 속도 \(\vec v_1\), \(\vec v_2\)로 동시에 움직이는 고립계를 생각한다.
고립계 이므로 한 입자에 작용하는 유일한 힘은 다른 입자로부터 오는 힘이다.
뉴턴의 제 3법칙을 통해 \(\vec F_{12} = - \vec F_{21}\) 이므로
\[\vec F_{21} + \vec F_{12} = 0\]뉴턴의 제 2법칙을 이용해 분석하고 가속도를 속도의 도함수로 정의한 것으로 대체하면
\[m_1 \frac {d\vec v_1}{dt} + m_2 \frac {d\vec v_2}{dt} = 0\]여기서 질량 \(m_1, m_2\) 가 일정하면, 식은 다음과 같이 정리할 수 있다.
\[\frac {d}{dt} (m_1 \vec v_1 + m_2 \vec v_2) = 0 \qquad (9.1)\]여기서 고립된 입자계에서 각 입자에 대한 이들의 합이 보존된다는 면에서 입자에 대한 \(m\vec v\)가 중요함을 알 수 있다. 이 양을 선운동량이라고 한다.
속도 \(\vec v\)로 움직이는 질량 \(m\) 인 입자나 또는 물체의 선운동량(linear momentum)은 질량과 속도의 곱으로 정의된다.
\[\vec p \equiv m\vec v \qquad (9.2)\]뉴턴의 제 2법칙을 사용하여 입자의 선운동량과 그 입자에 작용하는 합력 사이의 관계식을 이끌어낼 수 있다. 뉴턴의 제 2법칙으로 시작하고 가속도의 정의를 대입하면
\[\sum \vec F = m \vec a = m \frac {d\vec v}{dt}\]이다. 뉴턴의 제2법칙에서 질량 \(m\)이 일정하다면, \(m\)을 미분 연산 안으로 가져갈 수 있다.
\[\sum \vec F = \frac {d (m \vec v)}{dt} = \frac {d\vec p}{dt} \qquad (9.3)\]이 식은 입자의 선운동량의 시간 변화율이 그 입자에 작용하는 알짜힘과 같다라는 것을 보여 준다.
9.2 분석 모형 : 고립계 (운동량)
운동량의 정의를 통해 식 9.1은
\[\frac {d}{dt} (\vec p_1 + \vec p_2) = 0\]여기서 전체 운동량 \(\vec p_{tot} = \vec p_1 + \vec p_2\)의 시간에 대한 도함수가 0이므로, 전체 운동량은 일정해야 한다.
\[\vec p_{tot} = const. \qquad (9.4)\]또는 어떤 시간 간격 동안 다음과 같다.
\[\Delta \vec p_{tot} = 0 \qquad (9.5)\]식 9.5는 고립계에 있는 두 입자 또는 더 많은 입자가 상호 작용할 때, 이들 계의 전체 운동량은 항상 일정하게 유지된다고 기술 가능하다.
9.3 분석 모형 : 비고립계 (운동량)
비고립계에서 입자에 알짜힘 \(\sum \vec F\)이 작용하고, 이 힘이 시간에 따라 변한다고 가정해 보자. 뉴턴의 제 2법칙에 의하면 \(\sum \vec F = d \vec p/dt\) 이거나 또는
\[d \vec p = \sum \vec F dt \qquad (9.7)\]이다. 힘이 어떤 시간 간격 동안 작용 시, 이 식을 적분해 입자의 운동량 변화를 구할 수 있다. 만일 입자의 운동량이 시간\(t_i\) 일 때 \(\vec p_i\)에서 시간 \(t_f\) 일 때 \(\vec p_f\)호 바뀌 었다면 식 9.7을 적분하여
\[\Delta \vec p = \vec p_f - \vec p_i = \int_{t_i}^{t_f} \sum \vec F dt \qquad (9.8)\]을 얻는다. 식 9.8의 우항의 값을 시간 간격 \(\Delta t = t_f - t_i\)동안 입자에 작용한 알짜힘 \(\sum \vec F\)의 충격량이라 한다.
\[\vec I \equiv \int_{t_i}^{t_f} \sum \vec F dt \qquad (9.9)\]입자에 충격량을 가하는 알짜힘은 일반적으로 시간에 따라 변하기 때문에 시간에 대한 평균 알짜힘을 정의하는 것이 편리하다.
\[(\sum \vec F)_{avg} \equiv \frac{1}{\Delta t} \int_{t_i}^{t_f} \sum \vec F dt \qquad (9.10)\] \[\vec I = (\sum \vec F)_{avg} \Delta t \qquad (9.11)\]원리적으로 알짜힘이 시간의 함수라면 충격량은 식 9.9로부터 계산할 수 있다. 이 계산은 만일 입자에 작용하는 힘이 이렂ㅇ하면 특히 간단하다. 이 경우 식 9.11은 다음과 같다.
\[\vec I = \sum \vec F \Delta t \qquad (9.12)\]식 9.8과 9.9를 결합하면 충격량-운동량 정리로 알려진 중요한 식을 얻게 된다.
입자의 운동량의 변화는 입자에 작용하는 알짜힘의 충격량과 같다.
\[\Delta \vec p = \vec I \qquad (9.13)\]식 9.13은 운동량 보존의 원리를 가장 일반적으로 나타낸 표현이고 이를 운동량 보존 식이라고 한다.
9.4 일차원 충돌
충돌이라는 용어는 두 입자가 짧은 시간 동안 작용하여 서로에게 힘으로 상호 작용하는 경우를 나타낸다.
충돌 형태에 따라 계의 전체 운동 에너지는 보존될 수도 보존되지 않을 수도 있다. 그래서 운동 에너지가 보존되면 탄성 충돌, 보존되지 않으면 비탄성 충돌로 구분한다.
비탄성 충돌에는 두 가지 형태가 있다. 두 물체가 충돌하여 서로 붙어버리는 경우 이를 완전 비탄성 충돌이라 한다. 두 물체가 충돌하여 합쳐지지 않고 단지 운동 에너지의 일부가 변환되거나 전달되어 없어지는 경우 그냥 비탄성 충돌이라 한다.
완전 비탄성 충돌
질량 \(m_1\)과\(m_2\)인 두 입자가 같은 직선을 따라 각각 속도 \(\vec v_1\) 와 \(\vec v_2\)로 움직이는 경우를 생각하자.
이 두 입자가 정명 충돌하여 서로 붙은 뒤, 어떤 속도 \(\vec v_f\)로 움직인다. 어떤 충돌에서도 고립계의 운동량이 보존되므로, 충돌 전의 전체 운동량은 충돌 후에 합쳐진 물체의 전체 운동량과 같다.
\[\vec p = 0 \rightarrow \vec p_i = \vec p_f \rightarrow m_1 \vec v_{1i} + m_2 \vec v_{2i} = (m_1 + m_2)\vec v_f \qquad (9.14)\]나중 속도에 대하여 풀면 다음과 같다.
\[\vec v_f = \frac {m_1 \vec v_{1i} + m_2 \vec v_{2i}}{m_1 + m_2} \qquad (9.15)\]탄성 충돌
질량 \(m_1\)과\(m_2\)인 두 입자가 같은 직선을 따라 처음 속도 \(\vec v_{1i}\) 와 \(\vec v_{2i}\)로 움직이는 경우를 생각하자.
두 입자가 정면 충돌한 후 각각 다른 속도 \(\vec v_{1f}\)와 \(\vec v_{2f}\)로 충돌 위치를 벗어난다. 탄성 충돌에서 계의 운동량과 운동 에너지 모두 보존된다. 그러므로 수평방향으로의 속도를 고려할 때 다음과 같다.
\[p_i = p_f \rightarrow m_1 v_{1i} + m_2 v_{2i} = m_1 v_{1f} + m_2 v_{2f} \qquad (9.16)\] \[K_i = K_f \rightarrow \frac 12 m_1 v_{1i}^2 + \frac 12 m_2 v_{2i}^2 = \frac 12 m_1 v_{1f}^2 + \frac 12 m_2 v_{2f}^2 \qquad (9.17)\]속도가 왼쪽이나 오른쪽을 향하고 있다면 부호를 붙여 입자가 오른쪽으로 움직이는 경우는 양수, 왼쪽으로 움직이는 경우는 음수로 취급한다.
탄성 충돌에 관한 일반적인 문제의 경우, 두 개의 미지수가 존재하게 되는데, 이는 식 9.16 과 9.17을 연립하면 구할 수 있다.
\[m_1(v_{1i}^2 - v_{1f}^2) = m_2(v_{2i}^2 - v_{2f}^2)\] \[m_1(v_{1i}-v_{1f})(v_{1i}+v_{1f}) = m_2(v_{2f}-v_{2i})(v_{2f}+v_{2i}) \qquad (9.18)\] \[m_1(v_{1i} - v_{1f}) = m_2(v_{2f} - v_{2i}) \qquad (9.19)\] \[v_{1i} + v_{1f} = v_{2f} + v_{2i}\] \[v_{1i} - v_{2i} = -(v_{1f} - v_{2f}) \qquad (9.20)\]식 9.20을 식9.16과 함께 사용하여 탄성 충돌에 관한 문제를 풀 수 있다.
9.5 이차원 충돌
이차원 충돌에 대하여 운동량 보존에 관한 두 성분의 식을 얻을 수 있다.
\[m_1 v_{1ix} + m_2 v_{2ix} = m_1 v_{1fx} + m_2 v_{2fx}\] \[m_1 v_{1iy} + m_2 v_{2iy} = m_1 v_{1fy} + m_2 v_{2fy}\]아래 첨자 (1,2)는 각각의 물체를 나타내고 \((i,f)\)는 처음과 나중 값, 그리고 \((x,y)\)는 속도 성분을 나타낸다.
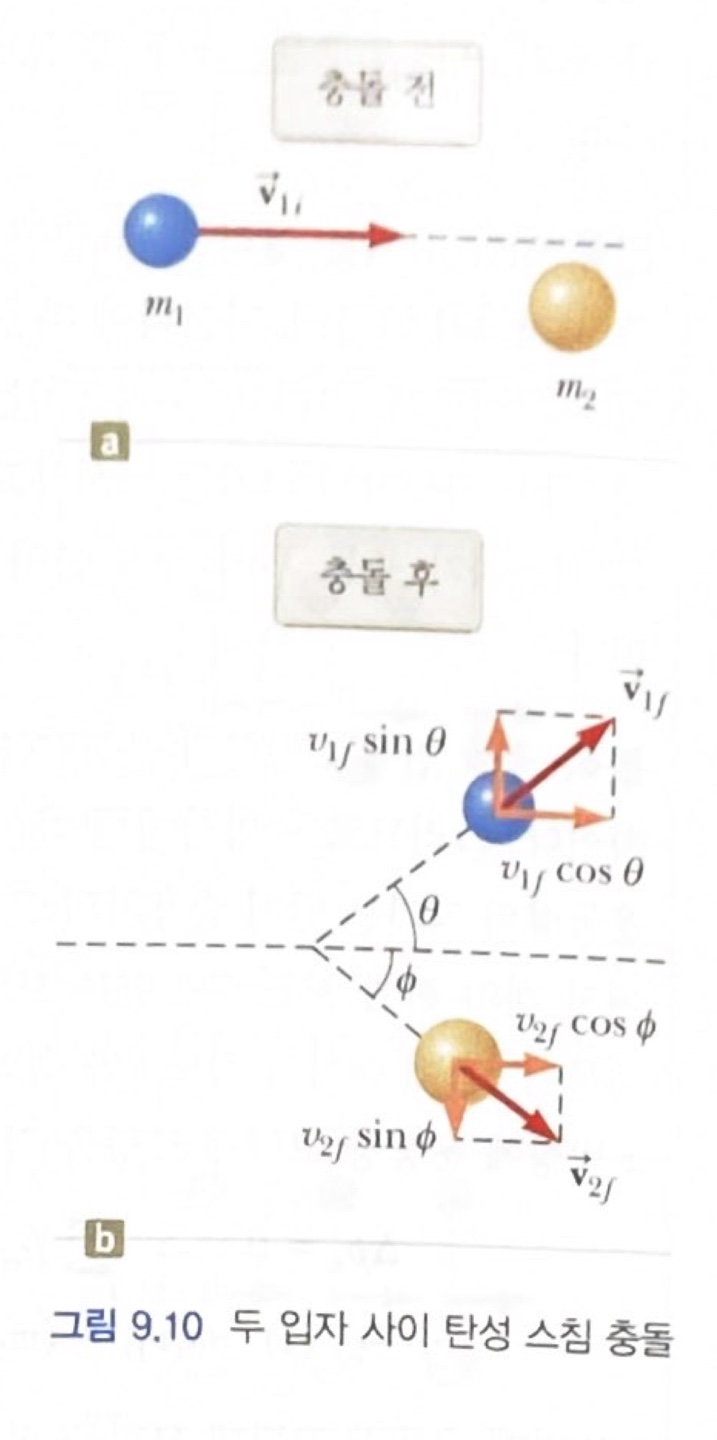
그림과 같이 질량 \(m_1\)인 입자가 질량 \(m_2\)로 처음에 정지해 있는 입자와 충돌하는 특별한 경우를 고려하자. 충돌 후 \(m_1\)은 수평에 대하여 각도 \(\theta\) 방향으로 움직이고, \(m_2\)는 수평에 대하여 각도 \(\phi\) 방향으로 움직인다. 이것을 스침 충돌 이라고 한다. 성분별로 운동량 보존의 법칙을 적용하자. 두 입자계의 운동량의 처음 \(y\) 성분이 0이므로,
\[\Delta p_x = 0 \rightarrow p_{ix} = p_{fx} \rightarrow m_1 v_{1i} = m_1 v_{1f} cos\theta + m_2 v_{2f}cos\phi \qquad (9.25)\] \[\Delta p_y = 0 \rightarrow p_{iy} = p{fy} \rightarrow 0 = m_1 v_{1f} sin\theta - m_2 v_{2f} sin\phi \qquad (9.26)\]식 9.26에서 음의 부호는 충돌 후 입자 2의 \(y\) 방향 속도 성분이 아래 방향이라는 것을 나타낸다. 지금 우리는 두 개의 독립적인 방정식을 가지고 있고, 이 두 식에있는 7개의 값 중에 두 개만 미지수이므로 이 문제를 풀 수 있다.
만일 탄성 충돌의 경우라면 식 9.17(운동 에너지의 보존)에 \(v_{2i} = 0\)을 이용하여
\[K_i = K_f \rightarrow \frac 12 m_1 v_{1i}^2 = \frac 12 m_1 v_{1f}^2 + \frac 12 m_2 v_{2f}^2 \qquad (9.27)\]을 얻는다. 입자 1의 처음 속력과 두 질량 값을 알고 있으므로 네 개의 미지수(\(v_{if}, v_{2f}, \theta, \phi\))가 남는다. 그런데 방정식이 세 개 밖에 없으므로, 네 개의 미지수 중 하나가 주어져야 보존의 법칙만으로 탄성 충돌 후의 운동을 계산할 수 있다.
만일 비탄성 충돌의 경우라면 운동에너지가 보존되지 않고, 식 9.27을 사용할 수 없다.
9.6 질량 중심
질량 중심이라는 특별한 관점에서 기술한다.
계는 적은 수의 입자들일 수도 있고, 공중을 뛰어오르는 체조 선수와 같이 크기를 가진 물체일 수도 있다.
이런 계의 운동은 마치 모든 질량이 질량 중심한 곳에 모여 있는 것과 같이 움직이는 것을 알게 될 것이다.
즉 계는 마치 알짜 외력이 질량 중심에 있는 단일 입자에 작용한 것처럼 움직인다.
그림과 같이 질량이 다르며 가볍고 단단한 막대로 연결된 한 쌍의 입자로 이루어진 계를 생각해보자.
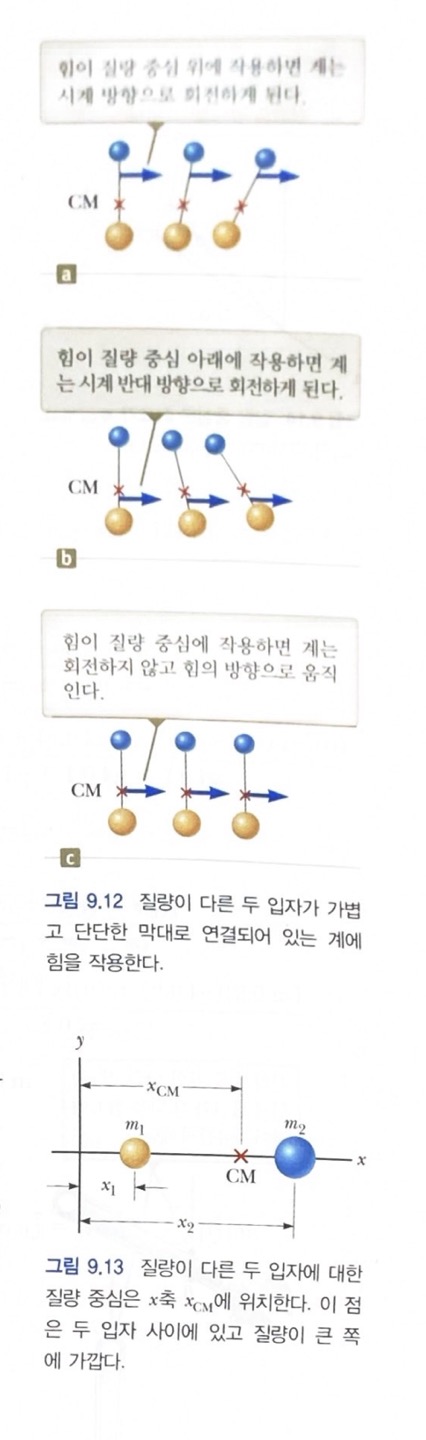
계의 질량 중심의 위치는 계의 질량의 평균 위치로 기술될 수 있다. 이 계의 질량 중심은 두 입자를 연결하는 선 상의 어딘가에 있으면서 질량이 큰 입자 쪽으로 가까운 곳에 위치한다.
만일 힘이 막대와 질량 중심 위 부분에 작용한다면, 계는 시계 방향으로 회전하게 된다.
반대로 힘이 막대의 질량 중심 아래 부분에 작용한다면, 계는 시계 반대 방향으로 회전하게 된다.
만일 힘이 질량 중심에 작용한다면, 계는 회전하지 않고 힘의 방향으로 움직인다. 이와 같은 방법으로 질량 중심을 쉽게 알아낼 수 있다.
그림에 경우 두 입자에 대한 질량 중심은 \(x\)축 위에 놓여 있으며, 입자 사이의 어딘가에 놓여 있다. 그 \(x\) 좌표 값은 다음과 같이 정의된다.
\[x_{CM} \equiv \frac {m_1 x_1 + m_2 x_2}{m_1 + m_2} \qquad (9.28)\]이런 질량 중심의 개념을 3차원에서 질량 \(m_i\)인 많은 입자로 이루어진 계로 확장하면,
\(n\)개 입자의 질량 중심의 \(x\)좌표는 다음과 같이 정의된다.
\[\begin{align} x_{CM} \equiv \frac {m_1 x_1 +m_2 x_2 + m_3 x_3 + \cdot \cdot \cdot + m_n x_n}{m_1 + m_2 + m_3 + \cdot \cdot \cdot + m_n} &= \frac {\sum _i m_i x_i}{\sum _i m_i} = \frac {\sum _i m_i x_i}{M} = \frac 1M \sum _i m_i x_i \qquad (9.29) \\ \end{align}\]\(y\)좌표와 \(z\)좌표에 대해서도 같은 방법으로 정의된다.
\[y_{CM} \equiv \frac 1M \sum _i m_i y_i \qquad 그리고 \qquad z_{CM} \equiv \frac 1M \sum _i m_i z_i \qquad (9.30)\]질량 중심은 3차원에서 위치 벡터 \(\vec r_{CM}\)으로 나타낼 수 있다. 이 벡터의 성분은 식 9.29 와 9.30에 정의된 \(x_{CM} , y_{CM} , z_{CM}\) 이다. 따라서
\[\vec r_{CM} = x_{CM} \hat i + y_{CM} \hat j + z_{CM} \hat k = \frac 1M \sum _i m_i x_i \hat i + \frac 1M \sum _i m_i y_i \hat j + \frac 1M \sum _i m_i z_i \hat k\] \[\vec r_{CM} \equiv \frac 1M \sum _i m_i \vec r_i \qquad (9.31)\]가 된다. 여기서 \(\vec r_i\)는 \(i\)번째 입자의 위치 벡터
\[\vec r_i \equiv x_i \hat i + y_i \hat j + z_i \hat k\]로 정의된다.
크기가 있고 연속적인 물체의 질량 중심을 구하는 것은 입자계의 질량 중심을 찾는것보다 좀 더 복잡하지만, 우리가 논의한 기본 개념은 여전히 적용된다.
크기가 있는 물체는 아주 많은 수의 질량이 적은 정육면체 요소로 구성된 계로 볼 수 있다.
그러나 질량 요소 사이의 간격이 매우 작으므로, 물체의 질량 분포가 연속적인 것으로 간주할 수 있다. 물체를 \(x_i, y_i, z_i\) 좌표에 있는 질량 요소 \(\Delta m_i\)로 나누면, 질량 중심의 \(x\)성분은 대략
\[x_{CM} \approx \frac 1M \sum _i x_i \Delta m_i\]가 되고, \(y_{CM} , z_{CM}\) 도 같은 형태로 주어진다.
만일 질량 요소의 수 \(n\)을 무한대로 하고 각 요소의 크기가 0에 접근하면 \(x_{CM}\)은 정확하게 주어진다. 이런 극한에서 합을 적분으로 바꾸고 \(\Delta m_i\) 를 미분 요소 \(dm\)으로 바꾸면
\[x_{CM} = \lim _{\Delta m_i \to 0} \frac 1M \sum _i x_i \Delta m_i = \frac 1M \int x dm \qquad (9.32)\] \[y_{CM} = \frac 1M \int y dm \qquad 그리고 \qquad z_{CM} = \frac 1M \int z dm \qquad (9.33)\]크기가 있는 물체의 질량 중심의 위치 벡터는 다음과 같이 표현할 수 있다.
\[\vec r_{CM} = \frac 1M \int \vec r dm \qquad (9.34)\]9.7 다입자계
다입자계를 도입하여 질량 중심에 대해 알아보자. 식 9.31로 주어진 위치 벡터를 시간에 대하여 미분함으로써 질량 중심 개념의 물리적 중요성과 활용도를 이해할 수 있다.
입자계의 \(M\)이 일정 하다면, 즉 입자들이 계로 들어가거나 나오지 않는다면, 계의 질량 중심의 속도를 다음과 같이 얻을 수 있다.
\[\vec v_{CM} = \frac {d \vec r_{CM}}{dt} = \frac 1M \sum _i m_i \frac {d \vec r_{i}}{dt} = \frac 1M \sum _i m_i \vec v_i \qquad (9.35)\]이 식을 다시 정리하면 다음과 같이 쓸 수 있다.
\[M \vec v_{CM} = \sum _i m_i \vec v_i = \sum _i \vec p_i = \vec p_{tot} \qquad (9.36)\]그러므로 계의 전체 선운동량은 전체 질량에 질량 중심의 속도를 곱한 것과 같다. 다시 말해 계의 전체 선운동량은 질량 \(M\)인 단일 입자가 속도 \(\vec v_{CM}\)으로 움직이는 운동량과 같다.
만일 식 9.35를 시간에 대해 미분하면, 계의 질량 중심의 가속도를 구할 수 있다.
\[\vec a_{CM} = \frac {dv_{CM}}{dt} = \frac 1M \sum _i m_i \frac {d\vec v_i}{dt} = \frac 1M \sum _i m_i \vec a_i \qquad (9.37)\]이 식을 다시 정리하여 뉴턴의 제2법칙을 이용하면 다음을 얻는다.
\[M \vec a_{CM} = \sum _i m_i \vec a_i = \sum _i \vec F_i \qquad (9.38)\]계의 어떤 입자에 작용하는 힘은 외려력(계의 외부로부터)과 내력(계의 내부로부터)을 둘 다 포함할 수 있다. 그러나 뉴턴의 제3법칙에 의하면, 입자 1이 입자 2에 작용하는 내력은 입자 2가 입자 1에 작용하는 내력과 크기가 같고 방향이 반대이다. 따라서 식 9.38에 있는 모든 내력벡터를 더할 때, 이들은 쌍으로 서로 상쇄되어 계에 작용하는 알짜힘은 단지 외력에 의한 것 뿐이다. 그러므로 식 9.38은 다음과 같이 된다.
\[\sum \vec F_{ext} = M \vec a_{CM} \qquad (9.39)\]즉 입자계에 작용하는 알짜 외력은 계의 전체 질량에 질량 중심의 가속도를 곱한 것과 같다. 식 9.39와 단일 입자에 대한 뉴턴의 제2법칙과 비교하면, 우리가 여러 장에서 사용한 입자 모형이 질량 중심으로 기술될 수 있음을 알 수 있다.
알짜 외력을 받아 운동하는 전체 질량 \(M\)인 계의 질량 중심의 궤적은 같은 힘을 받는 질량 \(M\)인 입자 한 개의 궤적과 같다.
식 9.39를 유한한 시간 간격에서 적분하자.
\[\int \sum \vec F_{ext} dt = \int M \vec a_{CM}dt = \int M \frac {d\vec v_{CM}}{dt}dt = M \int d \vec v_{CM} = M \Delta \vec v_{CM}\]이 식은 다음과 같이 쓸 수 있다.
\[\Delta \vec p_{tot} = \vec I \qquad (9.40)\]여기서 \(\vec I\)는 외력이 계에 전달한 충격량이며 \(\vec p_{tot}\)는 계의 운동량이다. 식 9.40은 입자에 대한 충격량-운동량 정리(식 9.13)를 입자계에 일반화한 것이다.
마지막으로 만일 계에 작용하는 알짜 외력이 0이어서 게가 고립되어 있다면, 식 9.39로부터
\[M \vec a_{CM} = M \frac {d \vec v_{CM}}{dt} = 0\]이 되고, 따라서 다입자계에 대한 운동량 고립계 모형은
\[\Delta \vec p_{tot} = 0 \qquad (9.41)\]으로 기술할 수 있고, 이는 다시
\[M \vec v_{CM} = \vec p_{tot} = const. \qquad (\sum \vec F_{ext} = 0 일 떄) \qquad (9.42)\]로 쓸 수 있다. 즉 입자게에 작용하는 알짜 외력이 없다면 입자계의 전체 선운동량은 보존된다. 그러므로 고립된 입자계에 대해 전체 운동량과 질량 중심의 속도 모두 시간에 대해 일정하다.
9.8 변형 가능한 계
이떄까지 역학의 논의에서 입자나 입자로 취급할 수 있는 변형되지 않는 계의 운동을 분석하였다. 9.7절에서의 논의는 변형 가능한 계의 운동에 적용할 수 있다.
예를 들어 스케이트보드 위에서 벽을 밀어서 벽에서 멀어지는 운동을 한다고 가정하자.
벽으로부터 손에 작용하는 힘은 변위가 0이다. 힘은 항상 벽과 손 사이에 위치한다. 따라서 이 힘은 계에 일을 하지 않는다. 여기서 계는 자신과 스케이트보드이다.
그러나 벽을 밀치면 실제로 계의 운동 에너지 변화가 초래된다. (일-운동 에너지 정리 \(W = \Delta K\))
변형 가능한 계의 운동을 분석하기 위하여, 에너지 보존 식인 식 8.2와 충격량-운동량 정리인 식 9.40을 도입한다. 위의 예시의 경우, 식 8.2는
\[\Delta E_{system} = \sum T \rightarrow \Delta K + \Delta U = 0\]이 된다. 이 식은 벽을 미는 데 근육이 사용됨에 따라 계의 퍼텐셜 에너지가 운동 에너지로 변환됨을 말해 주고 있다.
이런 상황에 식 9.40을 적용하면
\[\Delta \vec p_{tot} = \vec I \rightarrow m\Delta \vec v = \int \vec F_{wall} dt\]가 된다. 이 식의 우변을 구하기 위하여 벽으로부터 힘이 어떻게 시간에 따라 변하는지를 알 필요가 있다. 일반적으로 이 과정은 복잡하나 일정한 힘의 경우나 힘이 잘 정의되는 경우 식의 우변에 있는 적분을 계산할 수 있다.